Sumo Robot
A robot designed to push it's opponent out of the arena
Status: Complete
This project was part of my high school engineering class.
Students were given an arduino, ultrasonic distance sensors, light sensors, motors, and servos and tasked with designing a robot that would autonomously detect another robot and push it out of the ring.
The robots sensed their opponents using range sensors, and avoided the edge of the ring by using downward facing light detectors to detect the change in color at the edge.
This robot was constructed out of a 3D printed frame with lasercut acrylic panels. The electronics were soldered to a custom milled PCB and the arduino was programmed with a modified C++ language.
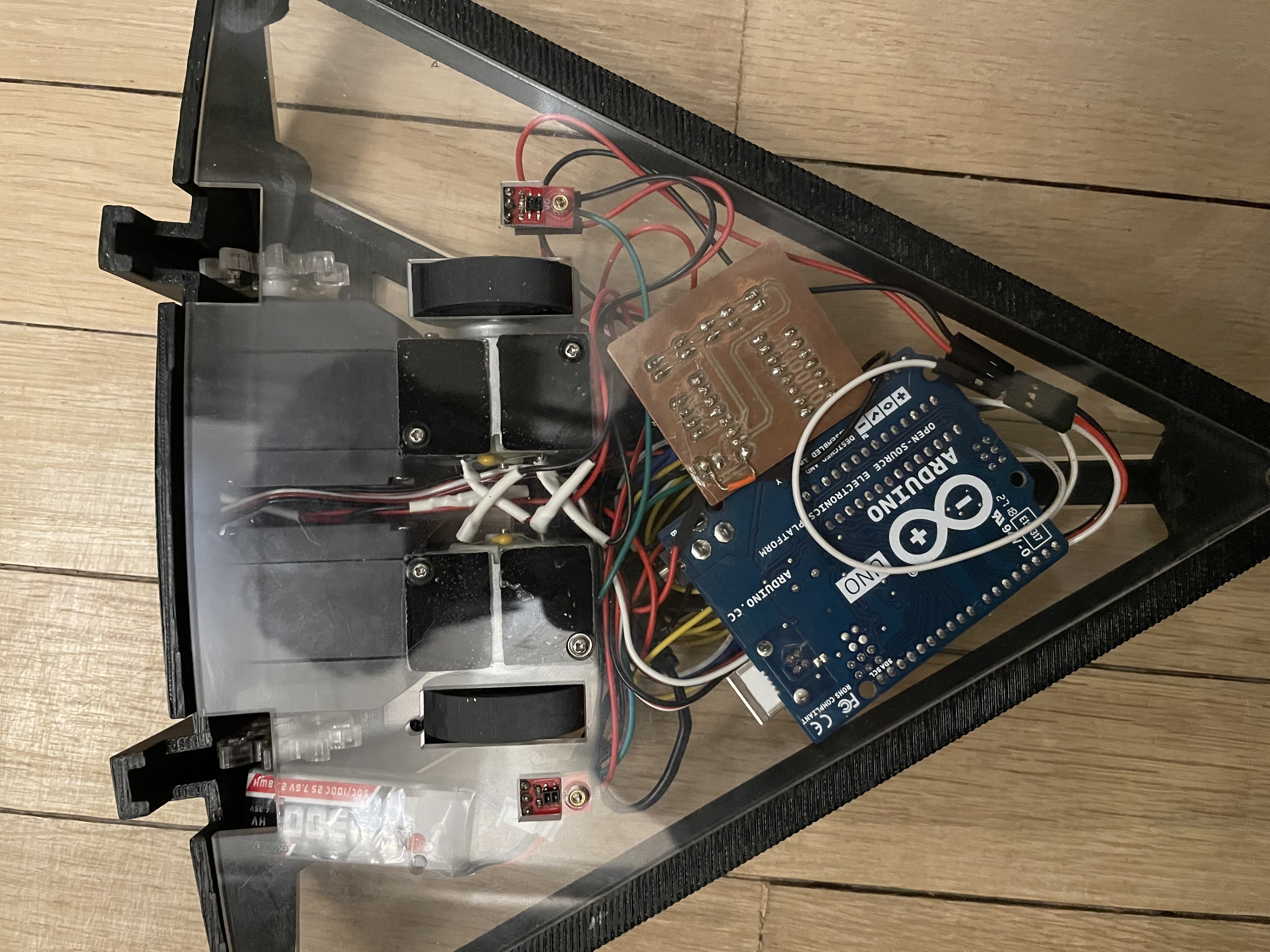
Components: 1x Arduino uno, 2x continuous rotation servos, 2x light sensors, 2x DC motors, 1x motor controller, 1x 2S LiPo battery, 1x custom milled PCB, 1x custom frame
1. Underside of completed robot
2. Completed frame without electronics
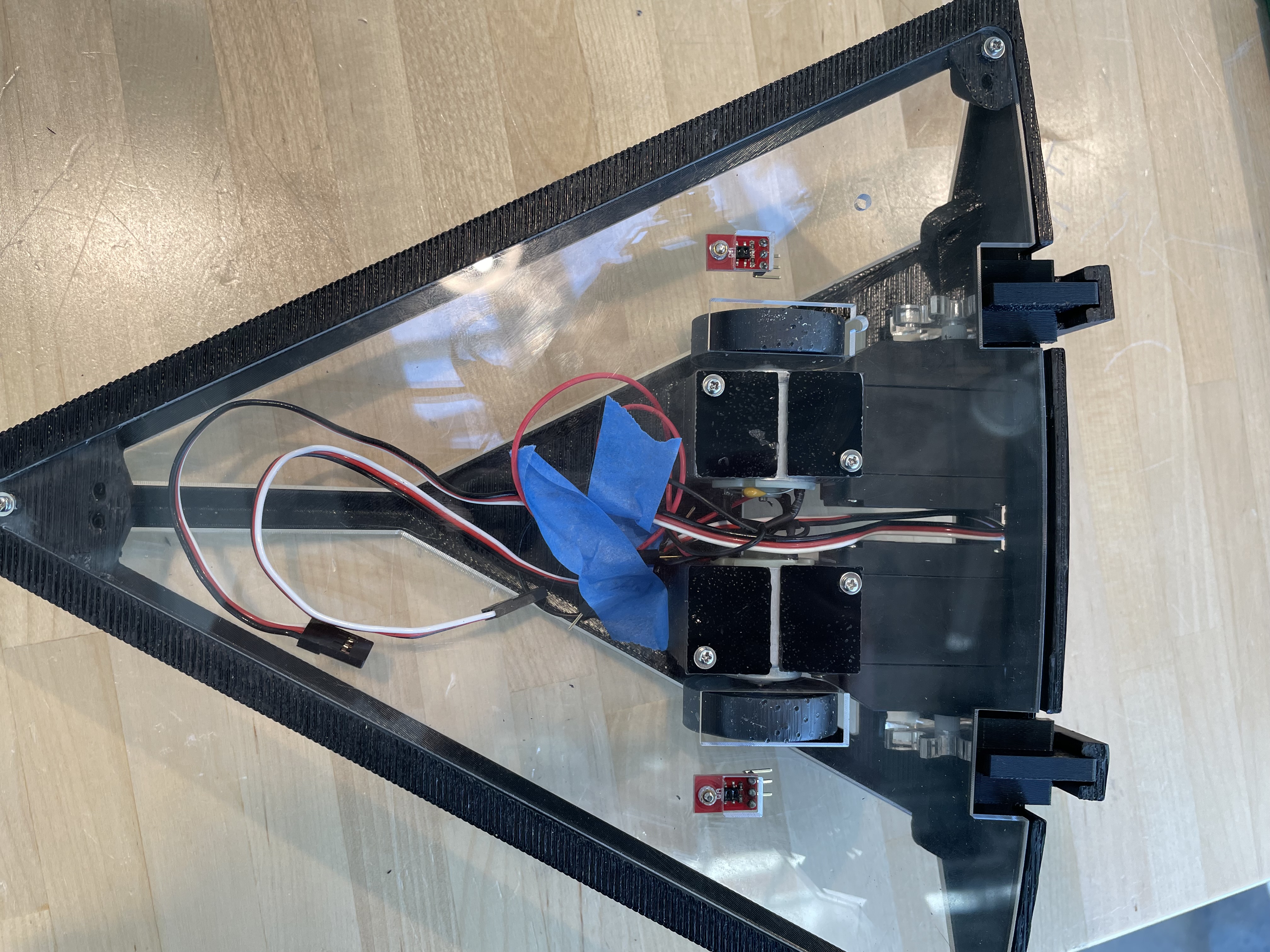
3. Underside of completed frame with some electronics installed
4. Milled PCB
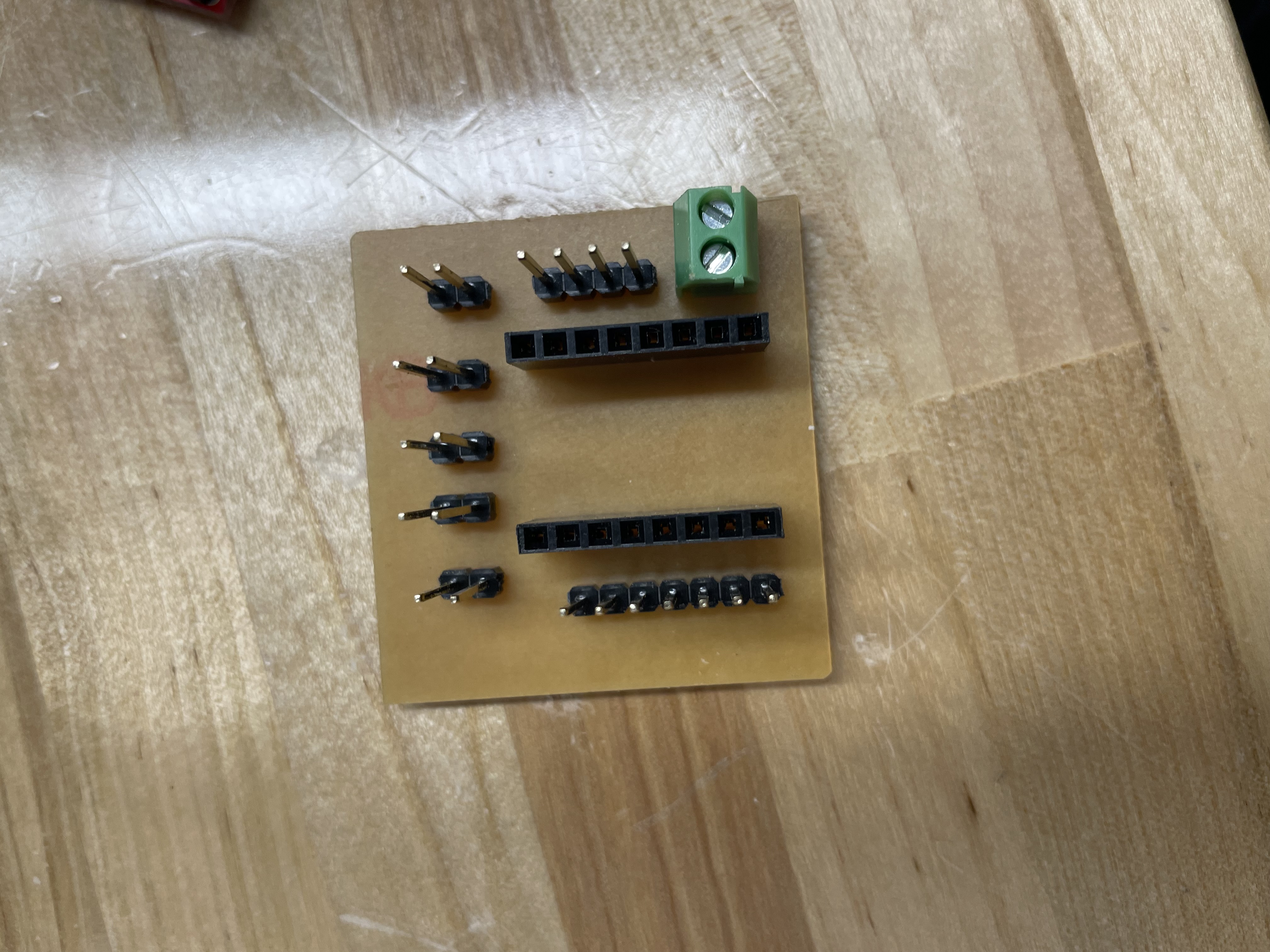
5. Top side of finished PCB
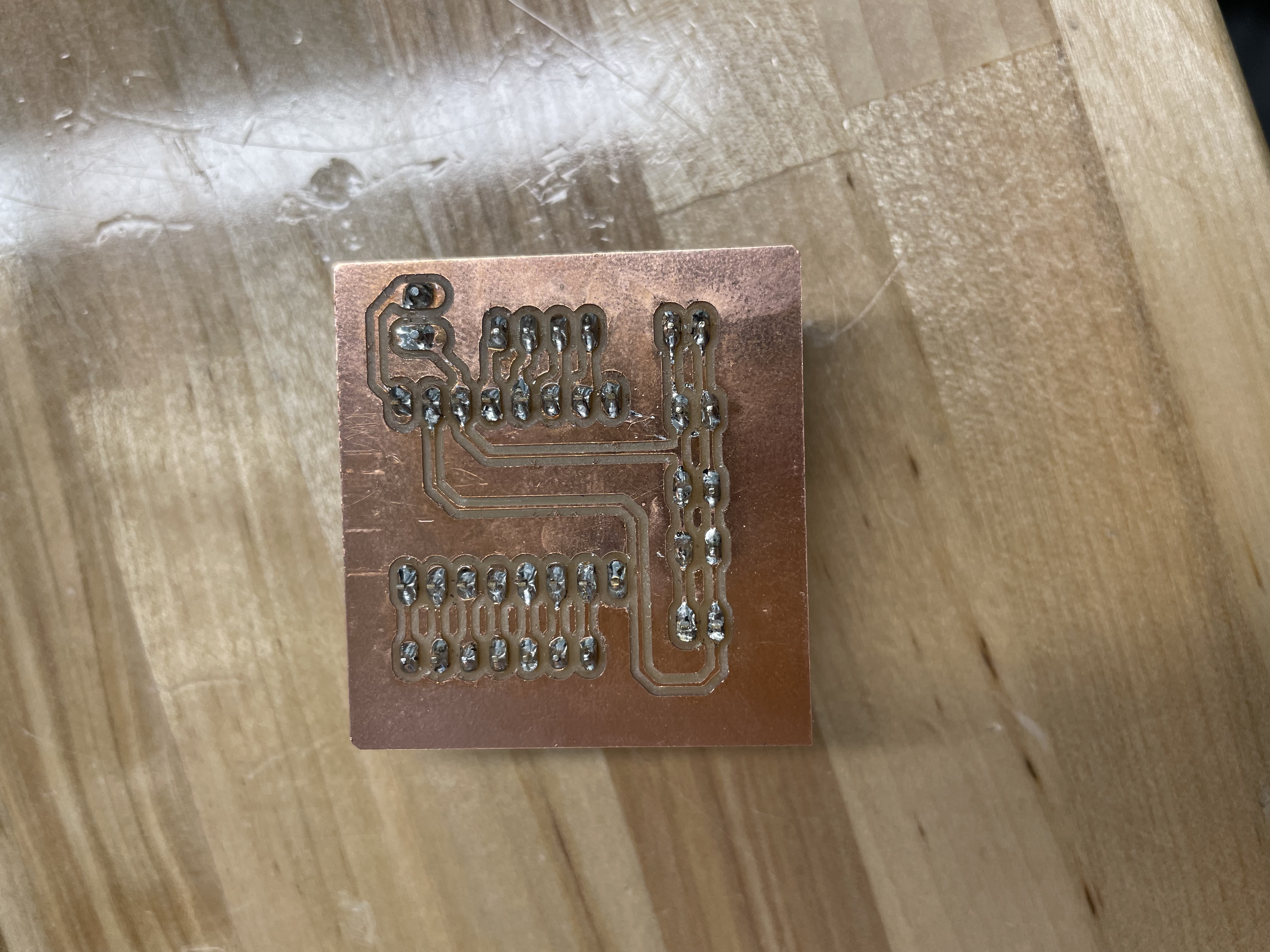
6. Bottom side of finished PCB